Věda a technika v pozadí
Robotická ruka
Teorie
Poprvé raketoplán obsahoval robotickou ruku Canadarm (Remote Manipulator System, zkráceně RMS) při letu raketoplánu Columbia s označením STS-2, který odstartoval 12. listopadu 1981. Vyvinula ho kanadská firma SPAR Aerospace a jeho délka byla 15,2 m, průměr 38 cm, měla šest stupňů volnosti a hmotnost 450 kg. Toto rameno pak měly všechny americké raketoplány kromě zkušebního prototypu Enterprise, celkem pět ramen absolvovalo na padesát misí. Nacházelo se vždy v nákladovém prostoru družicového stupně a byla dálkově ovládané. Používalo se k různým činnostem, např. k vypouštění a znovu zachycení nákladu raketoplánu, k montážním pracím apod. Po tragédii raketoplánu Columbia v roce 2003 byla na konec robotické ruky umístěna i kamera, která sloužila ke kontrole raketoplánu před návratem do atmosféry.

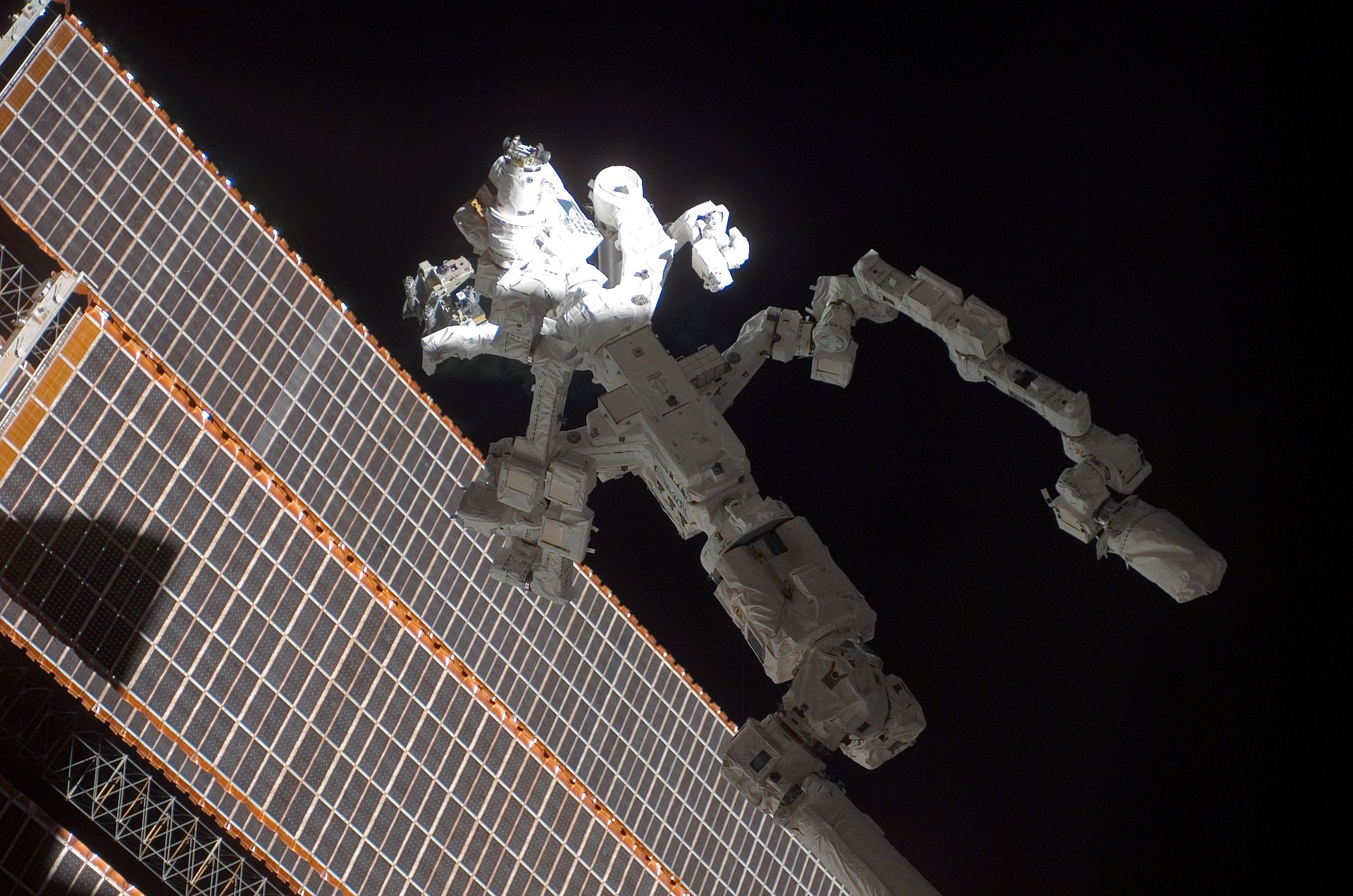
Na Mezinárodní kosmické stanici je umístěn robotický systém Kanadské kosmické agentury s názvem Canadarm2 (Mobile Servicing Systém, zkráceně MSS). Rameno se používá k manipulaci s nákladem mimo prostor stanice, podporuje také pohyb astronautů vně stanice. Rameno je ovládáno astronautem v kosmické stanici. Při úkolech, které vyžadují velkou přesnost může být astronaut ukotven k ruce pomocí úchytek chodidel. Robotickou paži ke stanici dopravila mise raketoplánu Endeavour STS-100 v dubnu 2001. Rameno je dlouhé 17,6 m, má sedm motorizovaných ohybných kloubů, průměr 35 cm a váží 1 800 kg. Jeho maximální nosnost 116 t umožňuje manipulovat i s nejtěžšími moduly stanice (cca 22 t) a raketoplánem (cca 70 t). V současnosti má ISS dvě robotické ruky, které obsáhnou celou stanici.
Třetím robotickým ramenem, které je součástí mobilního servisního systému na Mezinárodní vesmírné stanici je rameno Dextre (Special Purpose Dexterous Manipulator, zkráceně SPDM). Je to dvouramenný robot, telemanipulátor. Umožňuje vykonávat činnosti astronautů, které jinak vyžadují jejich výstup mimo stanici. Ke kosmické stanici bylo připojeno při letu raketoplánu Endeavour s označení STS-123, který startoval 11. března 2008. Při montáži byly zjištěny částečně nefunkční klouby, které opravila další mise.