

Teorie
Elektromotory jsou stroje, které přeměňují elektrickou energii na energii mechanickou. Jejich účinnost se pohybuje mezi 75 – 90 %. Energie se ztrácí na Jouleovo teplo, Foucaultovými proudy, hysterezí, jiskřením apod. Každý elektromotor se skládá z nepohyblivé části zvané stator a z pohyblivé části zvané rotor, neboli kotva, která se otáčí uvnitř statoru. Průchodem elektrického proudu vinutím statoru a vinutím rotoru se vytváří dvě magnetická pole, která na sebe vzájemně působí přitažlivými a odpudivými silami tak, že se rotor otáčí. Elektromotory můžeme rozdělit
| podle druhu proudu na elektromotory | stejnosměrné | střídavé | ||
| podle zapojení vinutí statoru a rotoru | sériové | derivační | ||
| podle druhu napájecího proudu | jednofázové | třífázové | ||
| podle vzájemného působení magnetických polí | synchronní | asynchronní | ||
Asynchronní elektromotor patří mezi nejpoužívanější motory. Velkým rozdílem oproti stejnosměrným i synchronním motorům je, že se do rotoru nepřivádí žádný proud a střídavý proud prochází jen vinutím statoru. Stator má tvar dutého válce složeného ze speciálních plechů silných přibližně 0,5 mm, které jsou navzájem izolovány lakem nebo papírem. V drážkách rozmístěných po obvodu statoru je uloženo trojí vinutí z izolovaných měděných nebo hliníkových vodičů, jimiž protéká třífázový střídavý proud. Rotor je složen ze stejných plechů a má tvar plného válce. Na jeho povrchu jsou drážky a do nich se vkládá buď třífázové vinutí podobné vinutí statoru (asynchronní kroužkový motor) nebo se do drážek vkládají neizolované tyče z mědi, které jsou na obou koncích spojeny měděnými kruhy (asynchronní motor s kotvou na krátko). Vinutí kotvy tvoří tyče z dobře vodivého kovu (nejčastěji se používá hliník), které jsou v čelech kotvy navzájem spojeny nakrátko. Vinutí připomíná klec a označuje se jako klecová kotva nebo také kotva nakrátko.

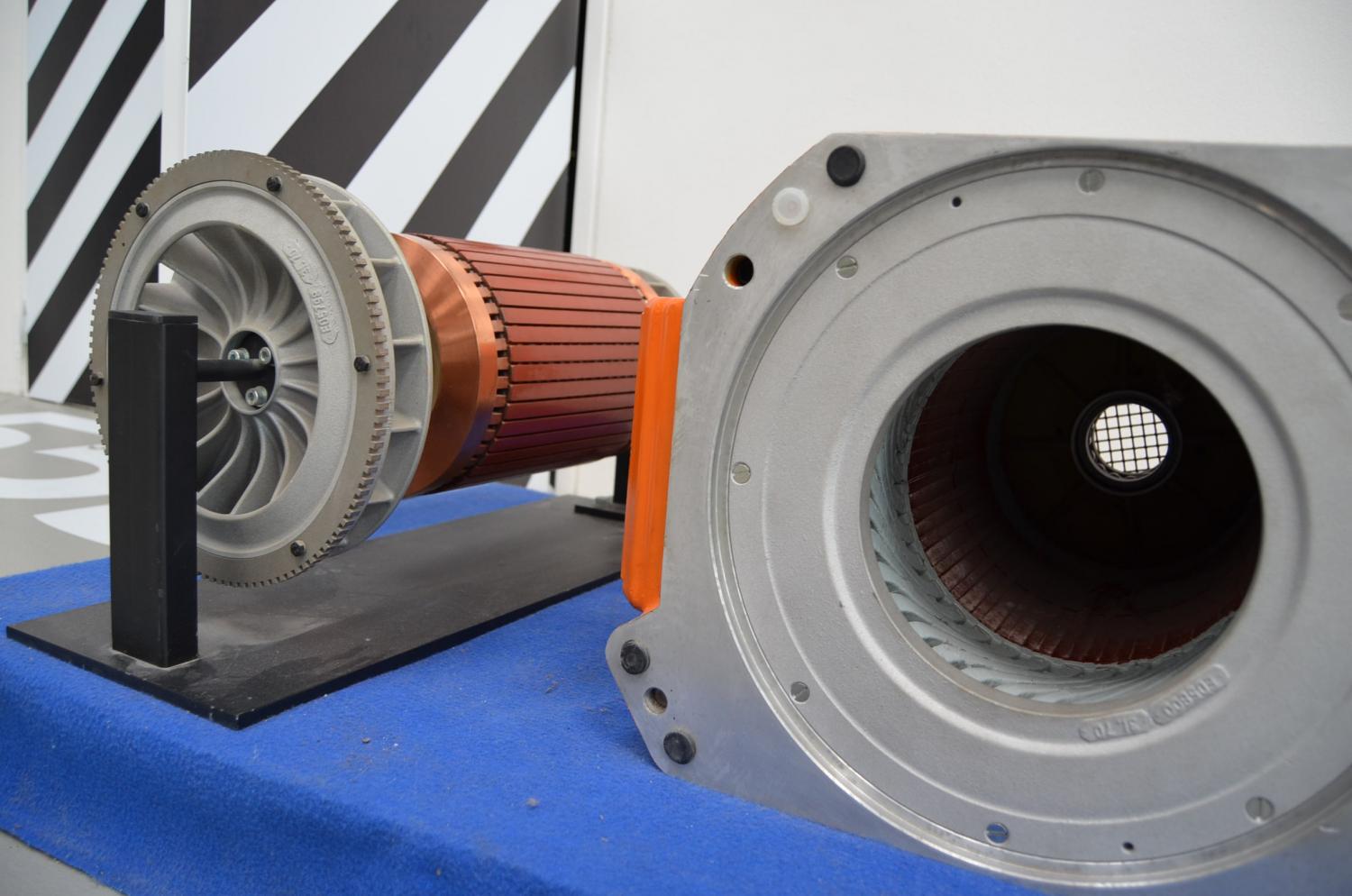
Řez třífázovým asynchronním motorem.
Zdroj: commons.wikimedia.org. Under Creative Commons.
Točivé magnetické pole statoru indukuje ve vinutí kotvy značné proudy. Podle Lenzova zákona vznikají magnetické síly, které působí na vodiče kotvy a kotva se roztočí ve směru otáčení magnetického pole. Rotor se však nemůže otáčet se stejnou frekvencí jako pole. Říkáme, že má určitý skluz. Se vzrůstající rychlostí rotoru se však bude rozdíl mezi otáčkami rotoru a točivého magnetického pole postupně snižovat, tím se ovšem bude snižovat i rychlost protínání tyčí indukčními siločarami, tím se bude snižovat i indukovaný proud a silové účinky točivého magnetického pole a otáčky rotoru se od určitého okamžiku nebudou dále zvyšovat. Rotor neběží shodně s točivým magnetickým polem.
Hliník není feromagnetická látka, proto jeho otáčení nemůžeme vysvětlit obdobně jako otáčení magnetky. V točivém magnetickém poli se v hliníkovém válci indukují v různých jeho částech odlišná napětí. Válcem začnou procházet tzv. vířivé proudy, které v točivém magnetickém poli vyvolají sílu, která válcem otáčí. Tato síla je tím větší, čím více se zpožďují otáčky motoru za otáčkami točivého magnetického pole. Z toho důvodu jde o asynchronní motor, tedy motor, který nemá synchronní otáčky. Jeho otáčky kolísají podle zatížení.
Záměnou dvou fázových vodičů ve svorkách motoru se změní směr otáčení točivého pole a motor se otáčí na opačnou stranu. Konstrukčními úpravami se asynchronní motory dají upravit na jednofázové asynchronní motory, které jsou vhodné pro menší spotřebiče, například pračky.

